In dieser Lektion baust du einen Futterautomaten, der mit einem micro:bit gesteuert wird, zum Beispiel für ein Haustier. Du brauchst dazu einen Gleichstrommotor und weitere Hardware.
Materialliste
Das brauchst du:
Einführung
Wenn du mit der Lektion fertig bist, wirst du dies können:
Einen micro:bit an ein Robotics Board anschließen
Mithilfe eines Programms einen Motor zum Laufen bringen
Aus Alltagsgegenständen einen Futterautomaten bauen, zum Beispiel aus Pappe, einem Schuhkarton und einer Flasche
Etwas programmieren, was nach einer bestimmten Zeit geschehen soll.
Hardware
Compact Robotics Board
Ein Compact Robotics Board kann zusammen mit dem micro:bit verwendet werden, um vier Gleichstrommotoren und acht Servomotoren anzutreiben. Das Compact Robotics Board verfügt außerdem über mehrere Eingangs- und Ausgangspins, so dass es für verschiedene Projekte sehr nützlich ist.
Das Compact Robotics Board lässt sich in MakeCode ganz einfach mit einer zusätzlichen Bibliothek programmieren.
Abbildung
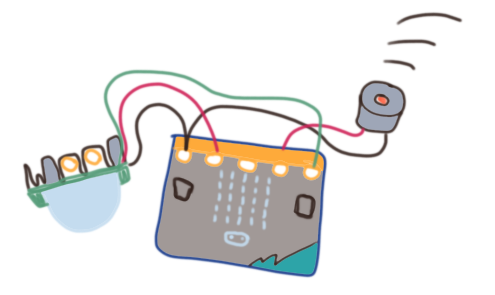
Einrichten von Robotics Board und micro:bit
Abbildung: Board, micro:bit, Batterien
Gleichstrommotor
Über das Robotics Board lässt sich ein Gleichstrommotor ansteuern, der dann mit verschiedenen Geschwindigkeiten vorwärts und rückwärts laufen kann.
Ein Gleichstrommotor ist ein Aktor. Mehr über Aktoren erfährst du hier: Aktor
Abbildung
Anschließen des Gleichstrommotors am Robotics Board
Am Robotics Board befinden sich vier Motoranschlüsse, ganz links ist Anschluss Nummer 1. Wenn du jetzt den Motoranschluss 1 wählst, musst du auch später in MakeCode den Motor 1 auswählen. Schließe deinen Motor an das Board an und schließe dann wie abgebildet eine Stromversorgung (zum Beispiel Batterie- oder Akku-Pack) an.
Abbildung
Software
Einführung
Mit dieser Schritt-für-Schritt-Anleitung programmierst du einen Futterautomaten.
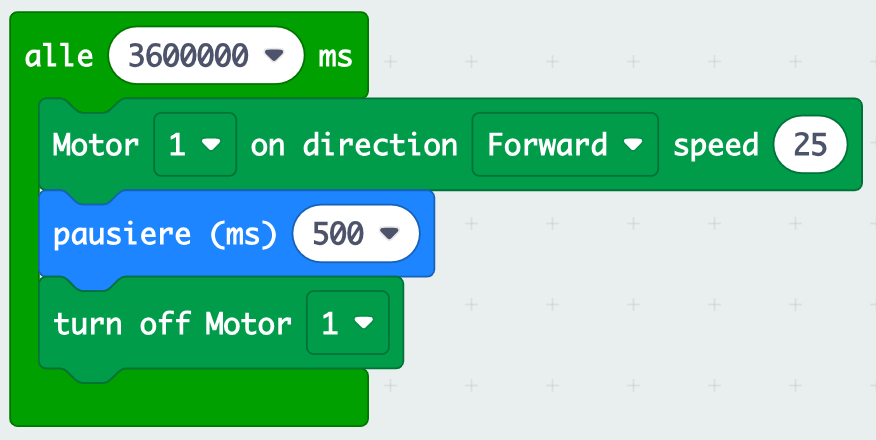
Wenn du mit dem Programmieren fertig bis, sollte dein Programm so aussehen:
Anschließen des micro:bit
Bevor du mit dem Programmieren deines Futterautomaten beginnen kannst, musst du deinen micro:bit so eingerichtet haben, dass er dein Programm von deinem Computer übernehmen kann:
Schritt 1
Schließe den micro:bit mit dem USB-Kabel an deinem Computer an.
Schritt 2
Öffne den Google Chrome-Browser, um sicherzustellen, dass alles wie in dieser Anleitung funktioniert.
Klicke auf "Neues Projekt" und gib ihm den Namen "Futterautomat".
Schritt 3
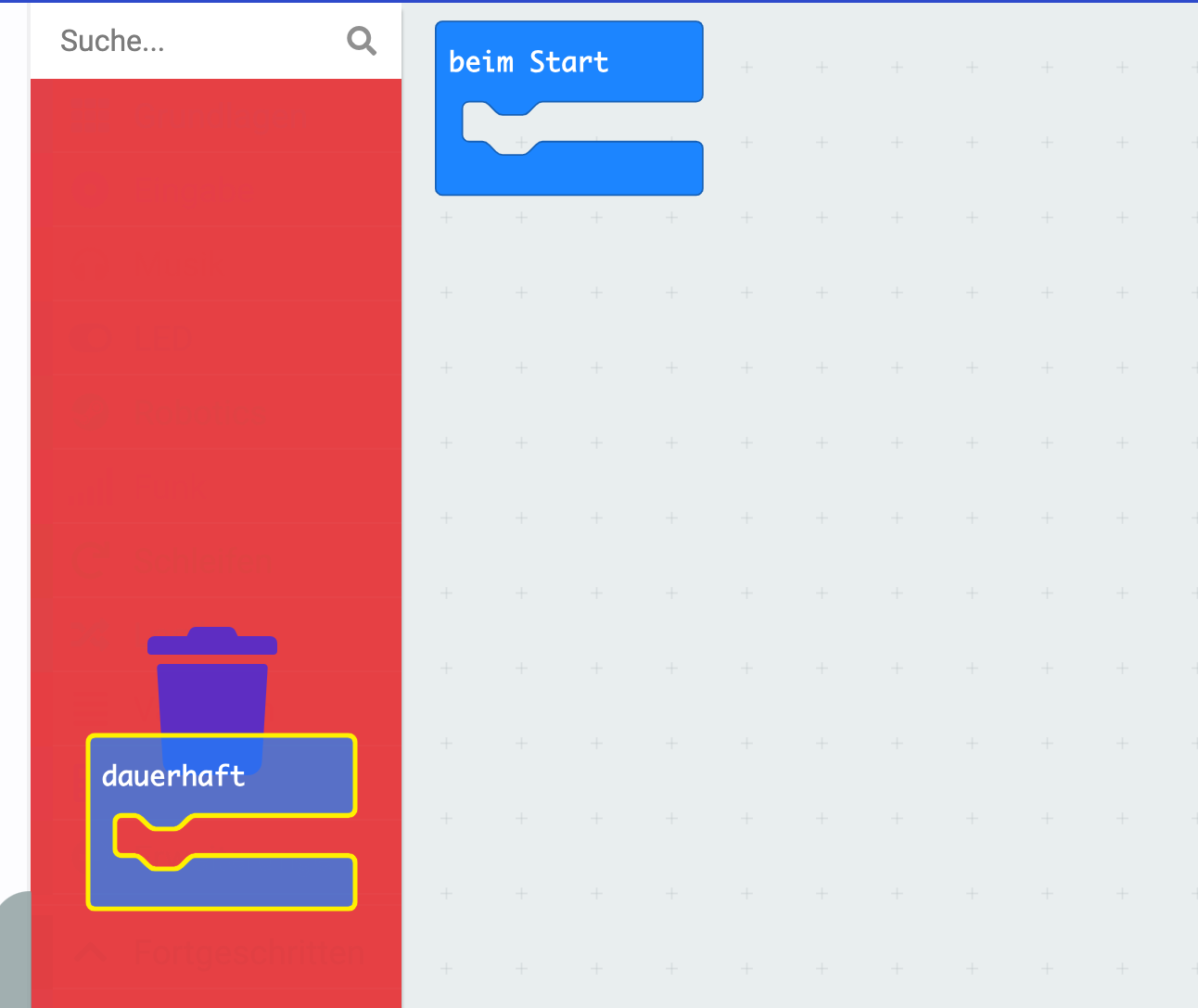
Lösche den Programmblock "dauerhaft", so dass nur noch der Programmblock "beim Start“ auf der Arbeitsfläche vorhanden ist. Zum Löschen ziehst du den Programmblock einfach nach links auf das Menü.
Schritt 4
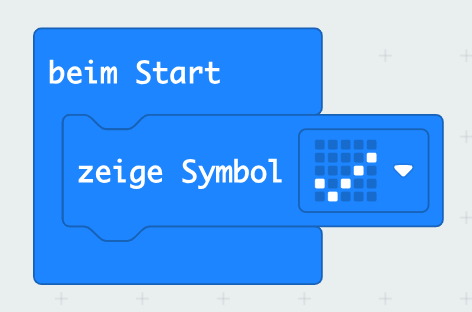
Füge in den Block "beim Start" den Befehl "zeige Symbol" ein und wähle dein eigenes Symbol oder das im Bild gezeigte Symbol aus.
Schritt 5
Verbinde jetzt deinen micro:bit mit der Browser-Anwendung. Klicke dafür auf die Schaltfläche mit den drei Pünktchen:
Schritt 6
Klicke im Menü auf "Gerät verbinden".
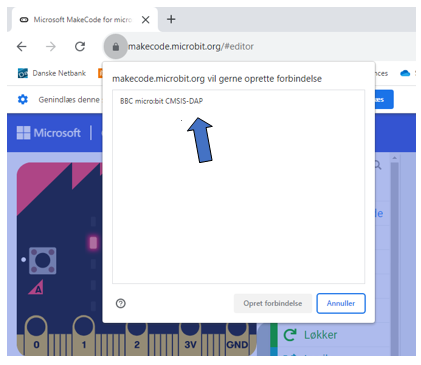
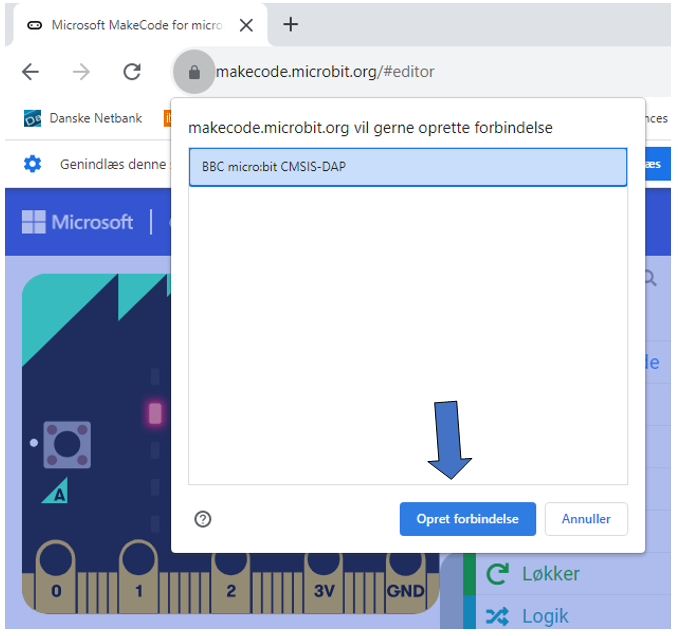
Dein micro:bit wird jetzt angezeigt, siehe Bild unten. Zum Herstellen der Verbindung klickst du jetzt auf "BBC micro:bit" und dann auf "Verbinden":
Schritt 7
Jetzt kannst du dein Programm aus MakeCode auf den micro:bit übertragen, indem du auf "Herunterladen" klickst:
Jetzt kannst du mit dem Programmieren loslegen.
Programmieren des Futterautomaten
Der Futterautomat besteht aus verschiedenen Hardware-Komponenten. Zuerst sollst du aber die Software für den Gleichstrommotor zum Laufen bringen. Den Rest bauen wir später.
Zum Programmieren des Futterautomaten benötigen wir zunächst eine zusätzliche Programmbibliothek, mit der wir das Robotics Board und den Gleichstrommotor steuern können.
Schritt 1
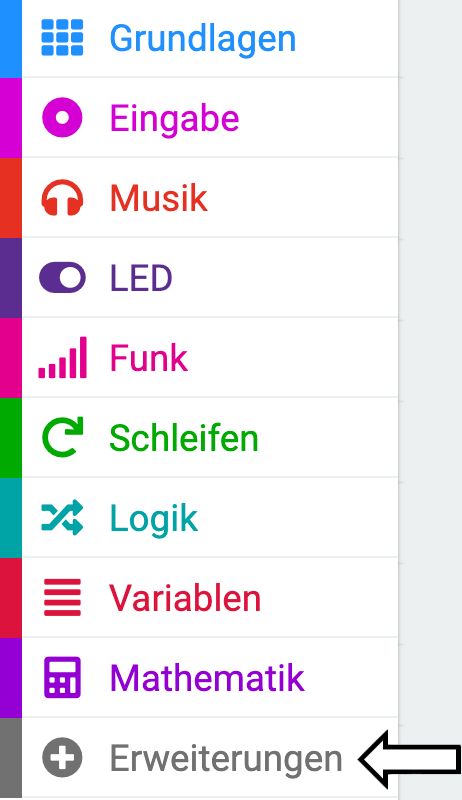
Klicke im Programmmenü links auf "Erweiterungen":
Schritt 2
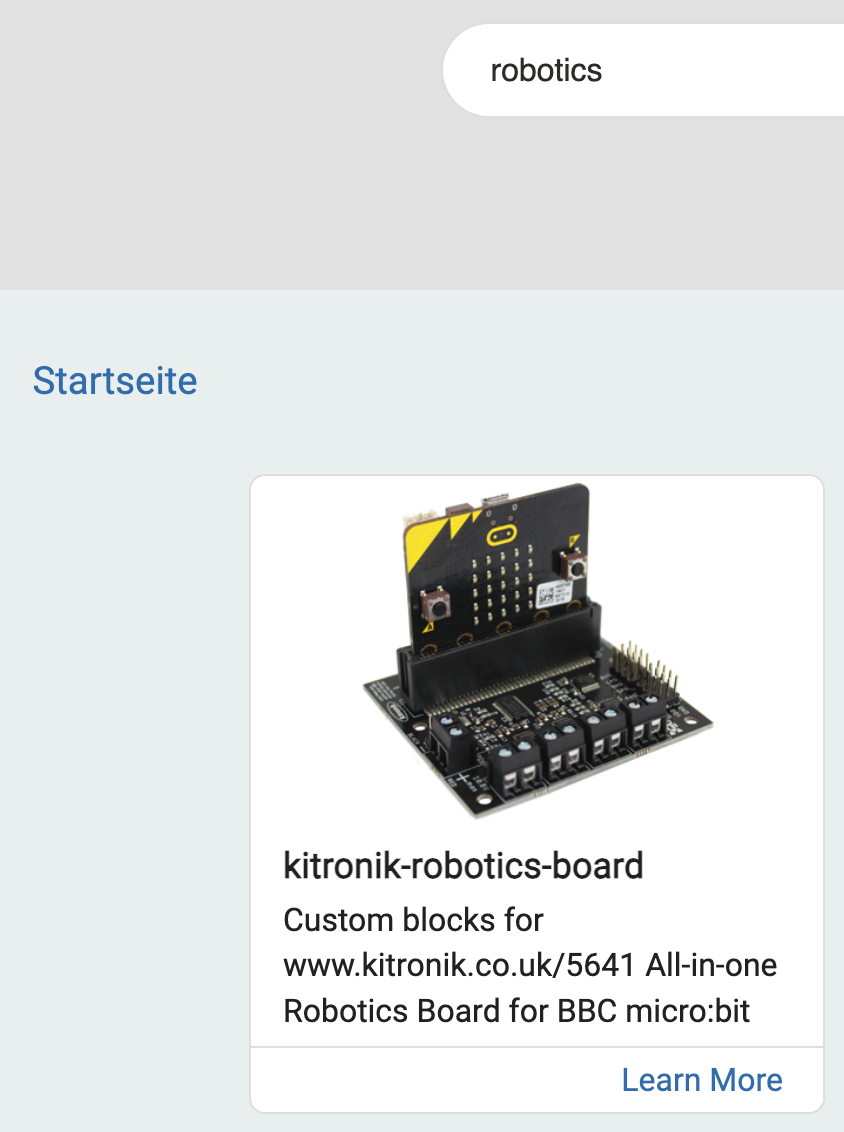
Gib im Suchfeld "Robotics" ein und wähle dann den ersten Eintrag des Suchergebnisses:
Schritt 3
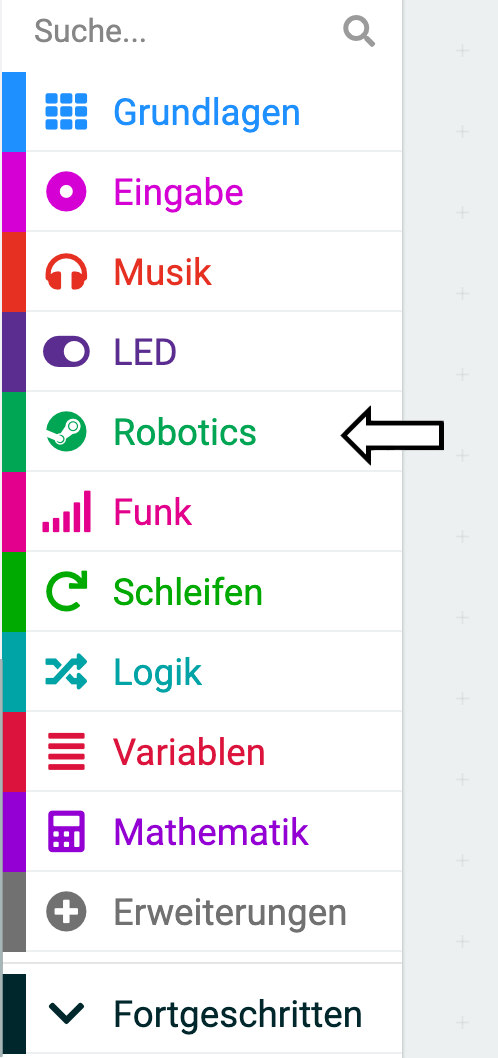
Die Hinzufügung wird jetzt im Programmmenü angezeigt:
Schritt 4
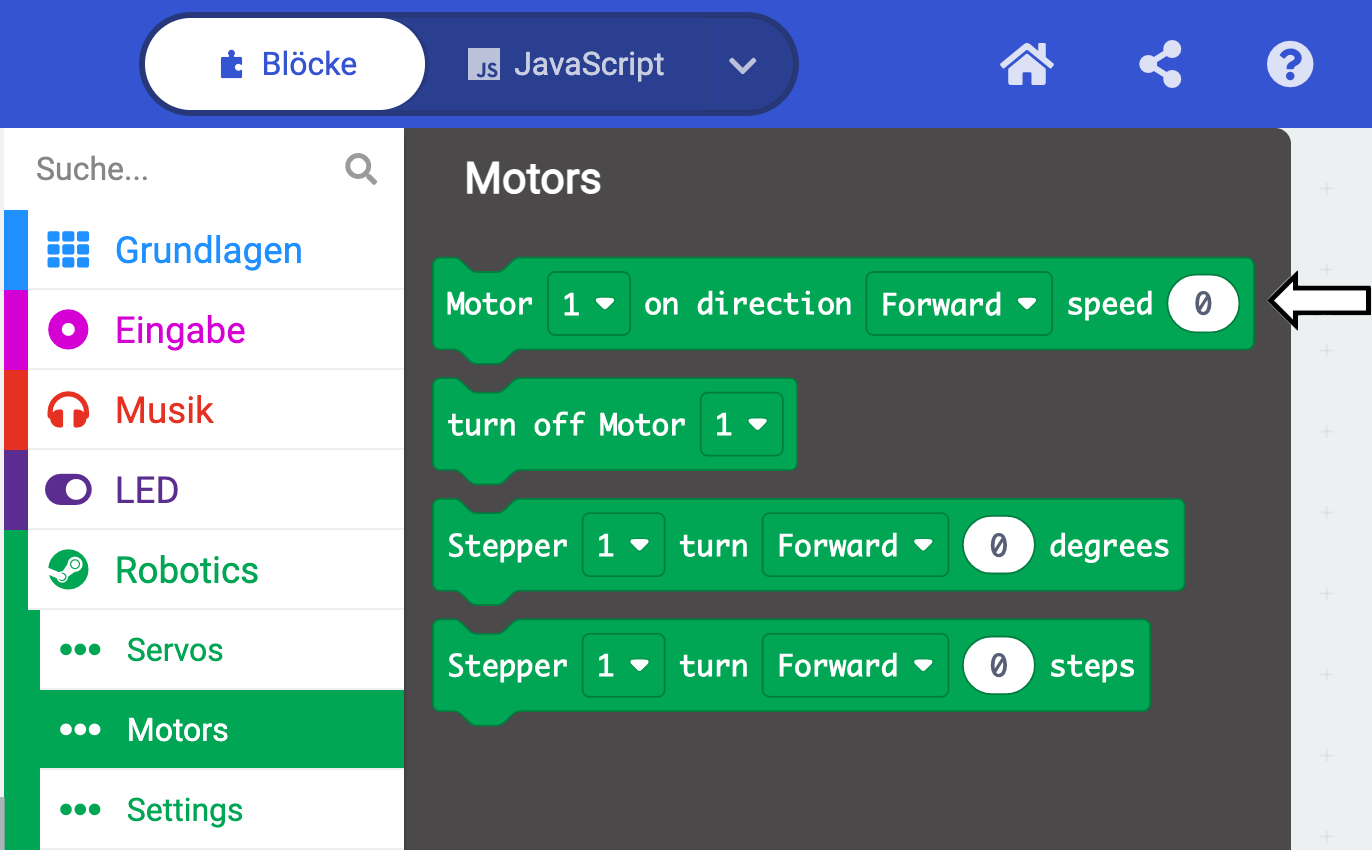
Klicke auf "Robotics" und dann auf "Motors" und ziehe den obersten Codeblock in den Programmierblock "beim Start".
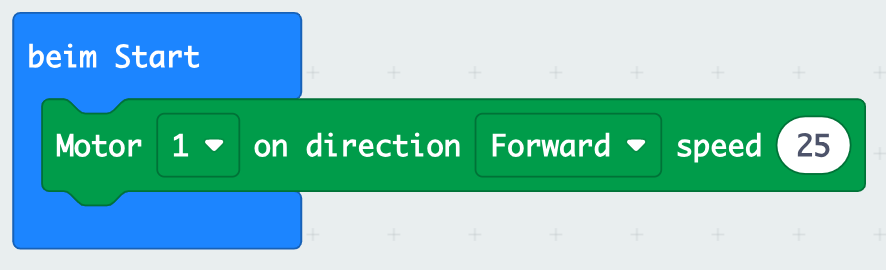
Schritt 5
Das Programm sieht jetzt so aus. Das heißt, wenn das Programm startet, läuft der Gleichstrommotor am Anschluss Nummer 1 des Robotics Boards vorwärts.
Schritt 6
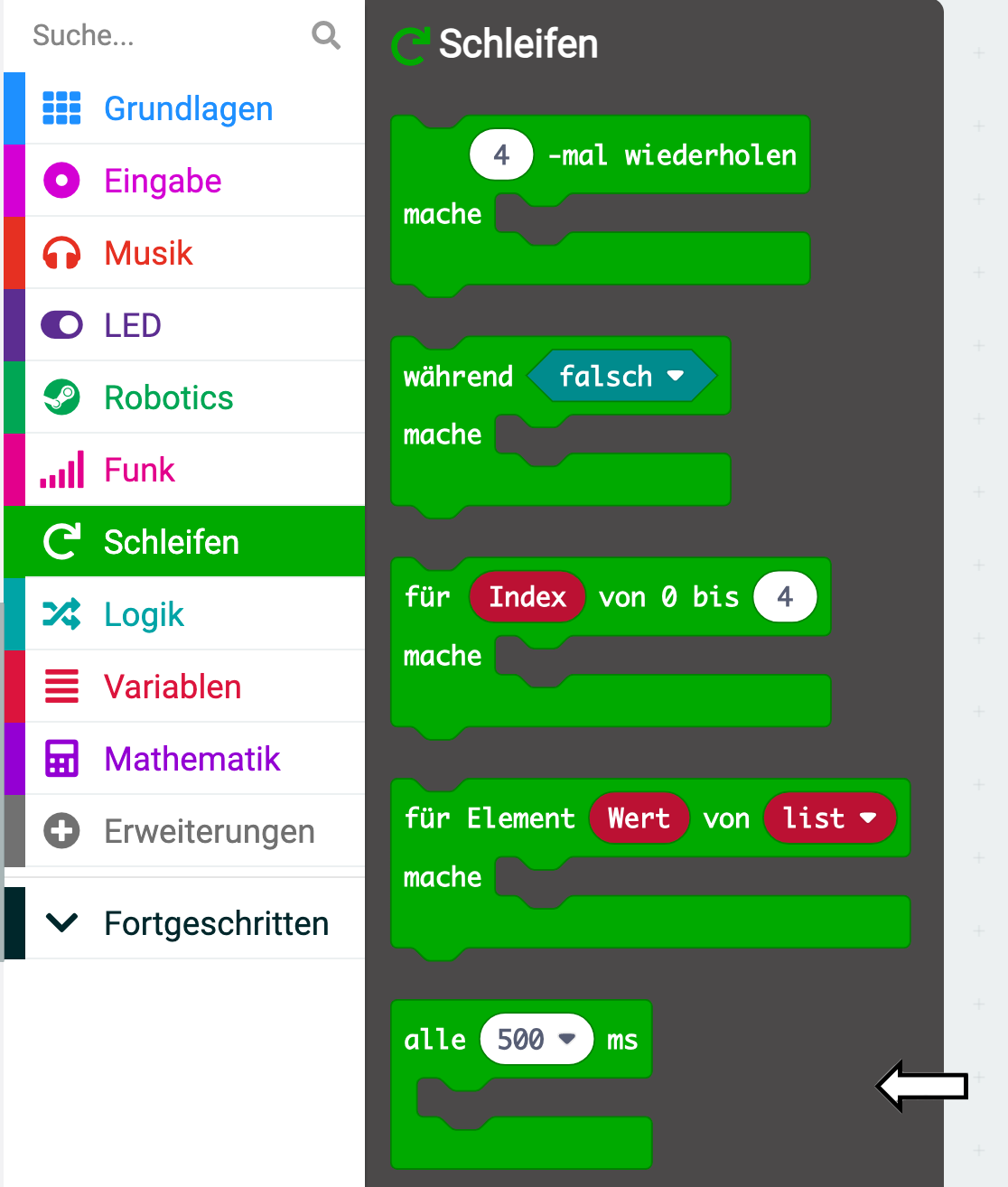
Wenn der Motor läuft, bist du bereit für den nächsten Schritt. Der Gleichstrommotor soll einmal pro Stunde für kurze Zeit ein Rad drehen, damit aus dem Automaten ein wenig Futter herausfällt.
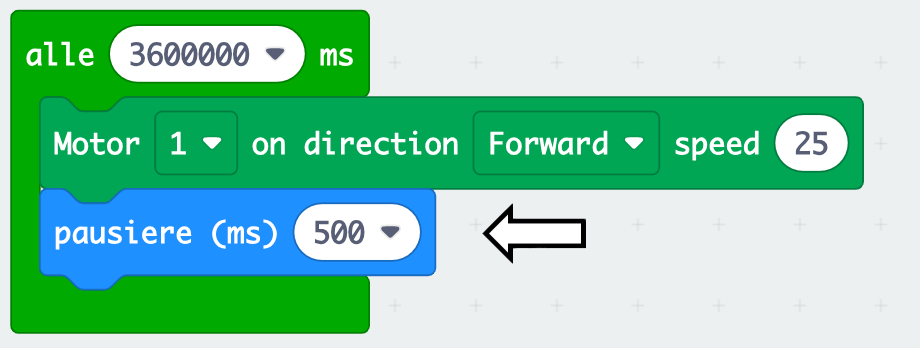
Klicke auf "Schleifen" und ziehe den mit dem Pfeil gekennzeichneten Codeblock auf deine Arbeitsfläche:
Schritt 7
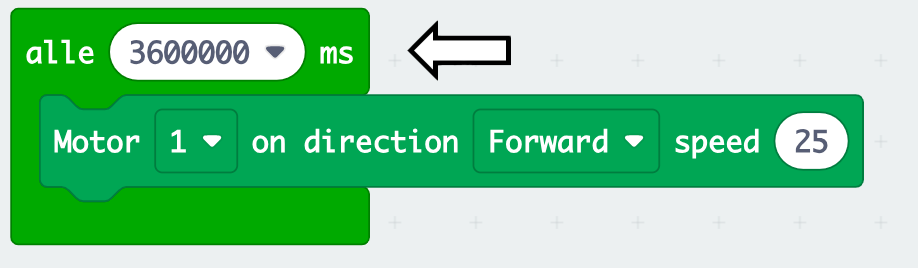
Der Codeblock für die Motorsteuerung soll nicht jedes Mal "beim Start" aktiviert werden. Ziehe ihn jetzt hinüber in den neuen Programmierblock "alle 500 ms". Jetzt überschreibst du die Zahl 500 mit der Zahl "3600000". Das entspricht einer Stunde:
Schritt 8
Der Motor braucht nur kurz zu laufen und kann dann stoppen. Ansonsten würde das gesamte Futter auf einmal herausfallen.
Klicke auf "Grundlagen", zieh den Codeblock "pausiere" in dein Programm und trage die Zahl "500" ein:
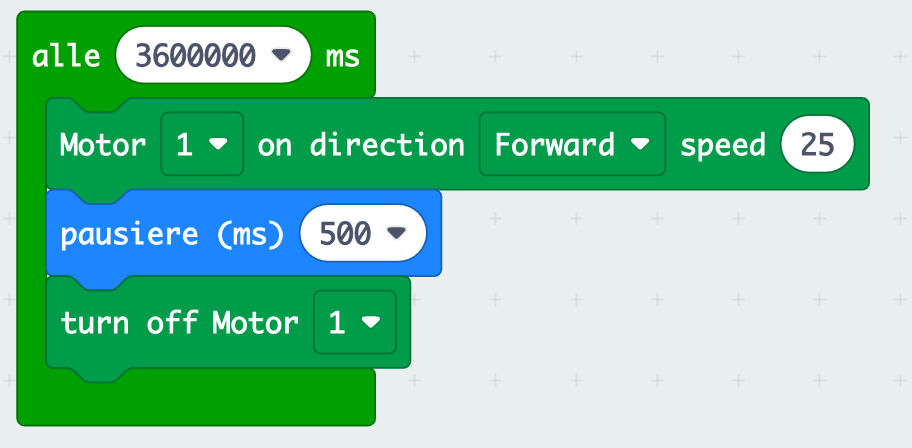
Schritt 9
Nach der Pause soll der Motor anhalten. Klicke auf "Robotics" und dann auf "Motors" und ziehe den Codeblock "turn off Motor" in dein Programm unter den Pausenblock.
Schritt 10
Dein Programm ist jetzt fertig. Es startet jede Stunde den Gleichstrommotor und stoppt ihn dann wieder. Dadurch dreht der Motor das Rad des Futterautomaten ein wenig, wodurch etwas Futter herausfällt.
Schritt 11
Lade dein Programm in den micro:bit herunter. Verwende dazu die Schaltfläche "Herunterladen".
Bauen des Futterautomaten
Einführung
Futterautomaten lassen sich auf verschiedene Weise und aus vielen verschiedenen Materialien bauen, die es bei euch zu Hause gibt. Wir zeigen euch hier eine Variante, die wir uns ausgedacht haben. Wenn du nicht genau dieselben Utensilien wie Schachtel, Tasse, Schale oder Flasche hast, macht das nichts – du kannst die Bauanleitung trotzdem befolgen und einfach ähnliche Gegenstände verwenden.
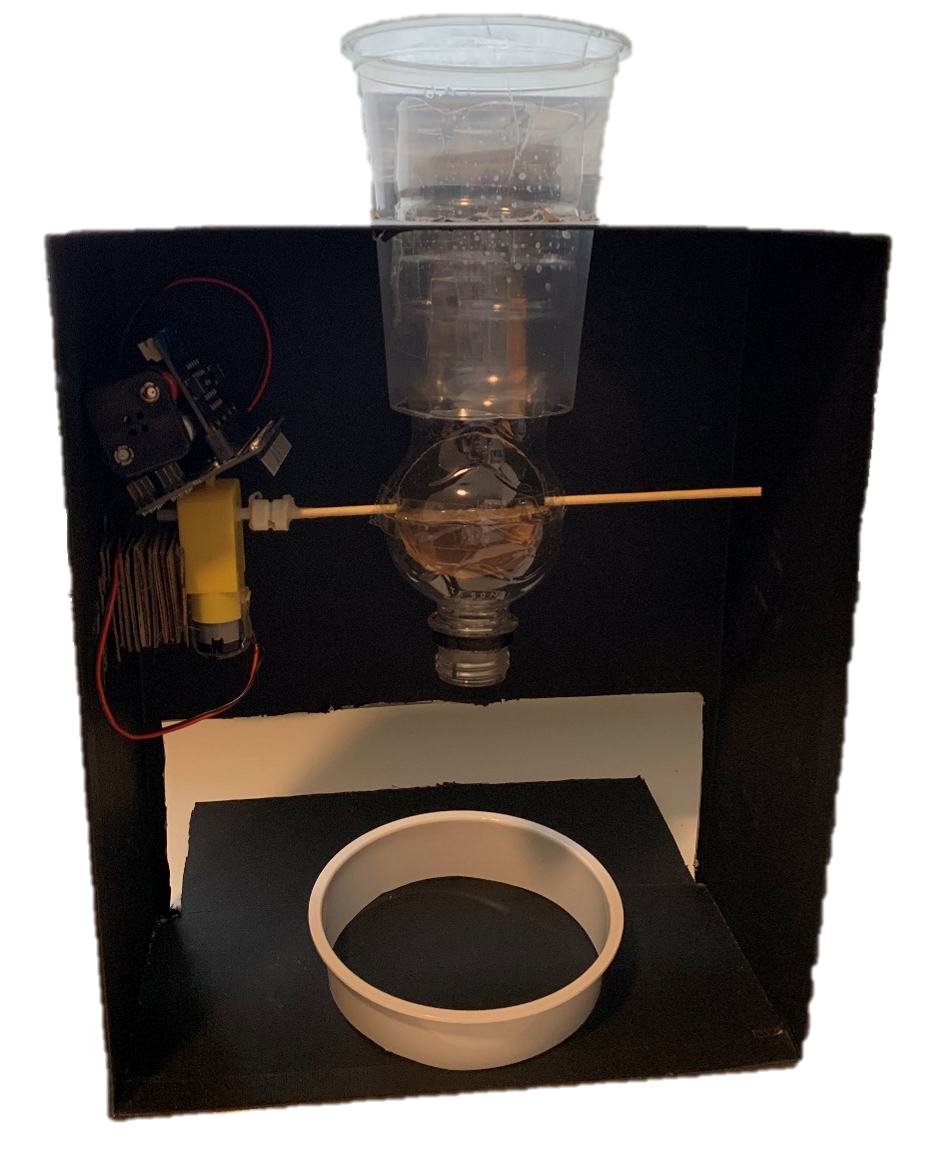
Hier ist ein Bild des fertigen Futterautomaten von vorn:
Schritt 1
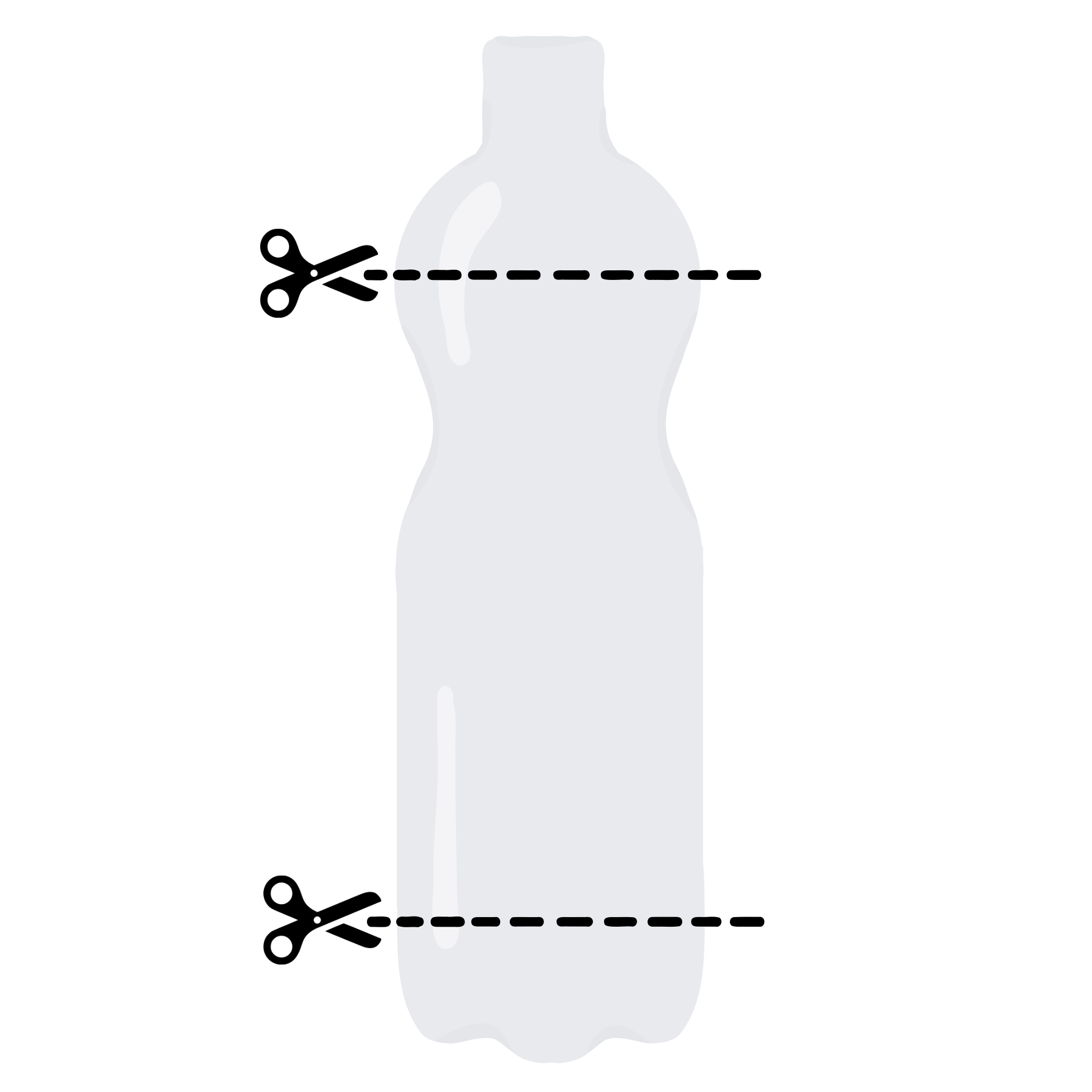
Zuerst brauchst du eine Plastikflasche. Wasche sie gut aus, damit sie sauber ist.
Schneide mit einer Schere oder einem Messer den Hals und den Boden ab. Der Hals und das Mittelstück dürfen nicht kaputt gehen, denn diese beiden Teile brauchst du.
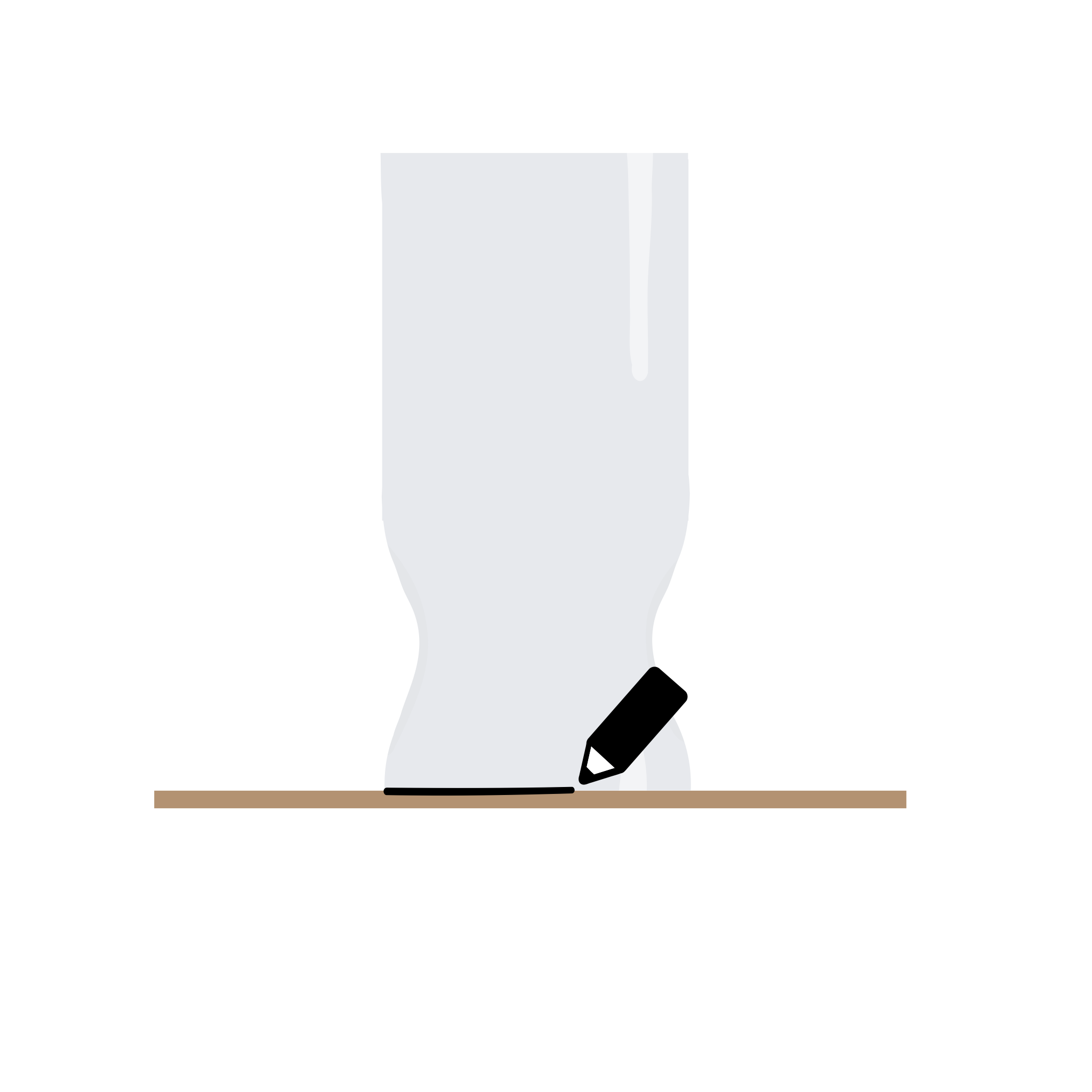
Nimm das Mittelstück der Flasche und lege es umgedreht auf ein festes Stück Pappe. Gut geeignet ist Wellpappe. Zeichne den Umfang der Flasche als Kreise auf die Pappe. Zeichne vier Kreise auf.
Aus den Kreisen werden Pappscheiben, die du als Bauteile für ein Schaufelrad brauchst, das sich in der Flasche drehen kann.
Schneide die Scheiben aus der Pappe aus. Es empfiehlt sich, die Scheiben etwas kleiner auszuschneiden als die aufgezeichneten Kreise, damit sie in der Flasche Platz haben. Nimm ein Lineal und zeichne die Kreise etwa 6 mm kleiner auf als der Flaschenumfang, bevor du sie ausschneidest.
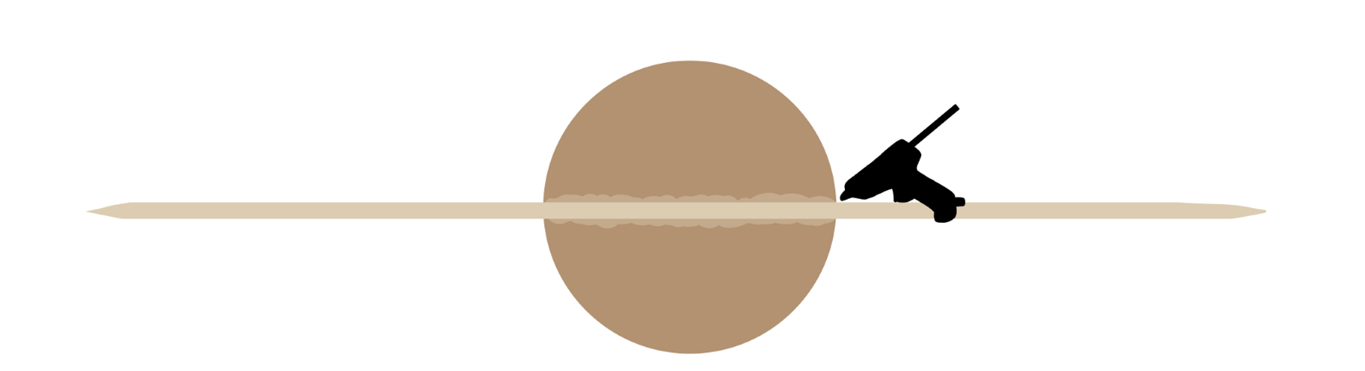
Jetzt halbierst du die Scheiben und klebst die Hälften an einen Grillspieß aus Holz.
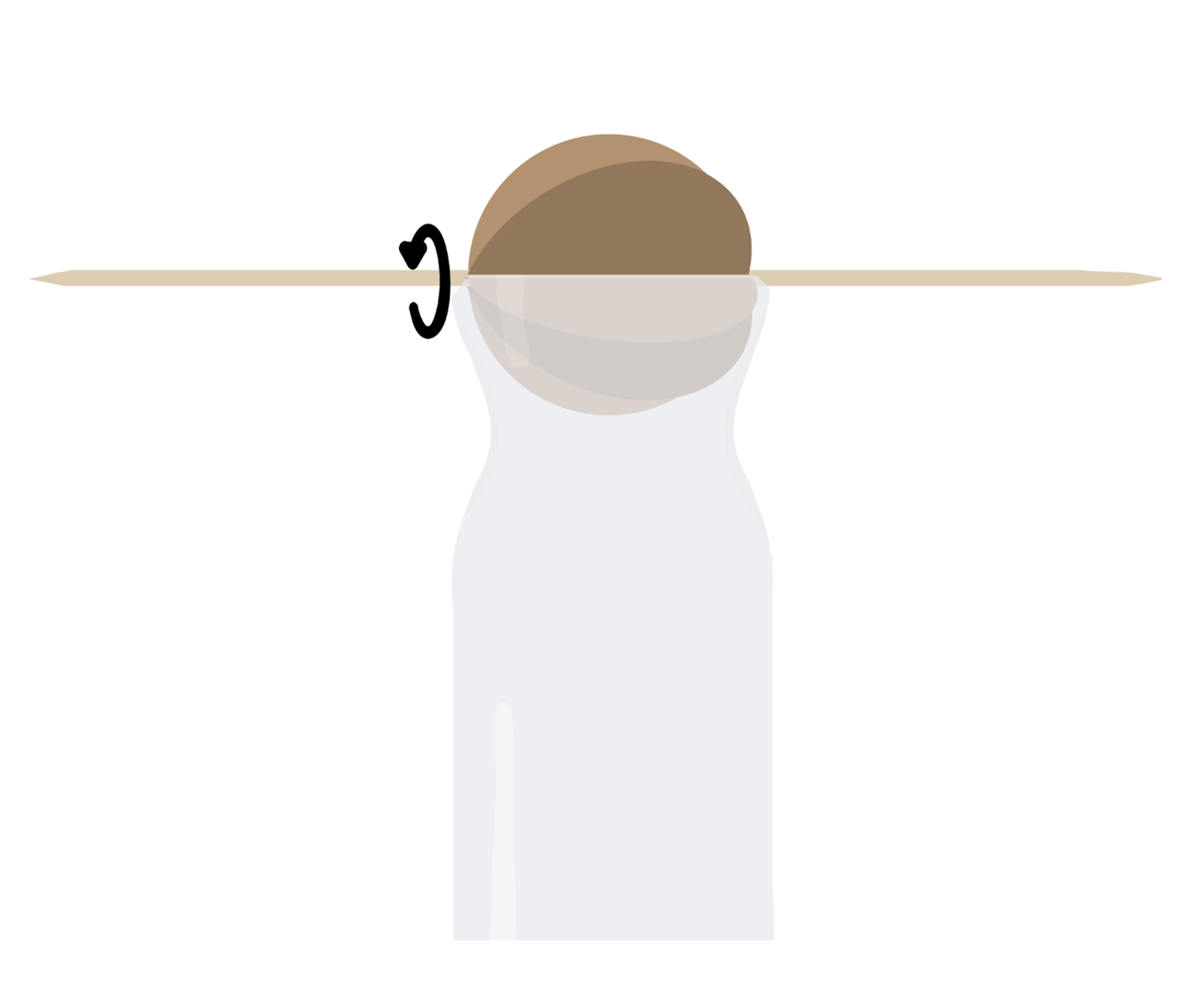
Jetzt schneidest du je zwei kleine Dreiecke aus dem Mittelstück und dem Hals der Flasche aus. Die Dreiecke sollen sich gegenüberliegen und dienen zur Aufnahme des Grillspießes mit dem Schaufelrad. Wenn die Flasche wieder zusammengebaut wird, werden die Dreiecke zu Löchern, in denen sich das Schaufelrad drehen kann.
Bevor du weiterbaust, probiere aus, ob die erste Scheibe, die du an den Spieß geklebt hast, sich innerhalb der Flasche frei drehen kann, ohne gegen die Seiten zu stoßen. Falls die Scheibe irgendwo anstößt, schneide sie zurecht.
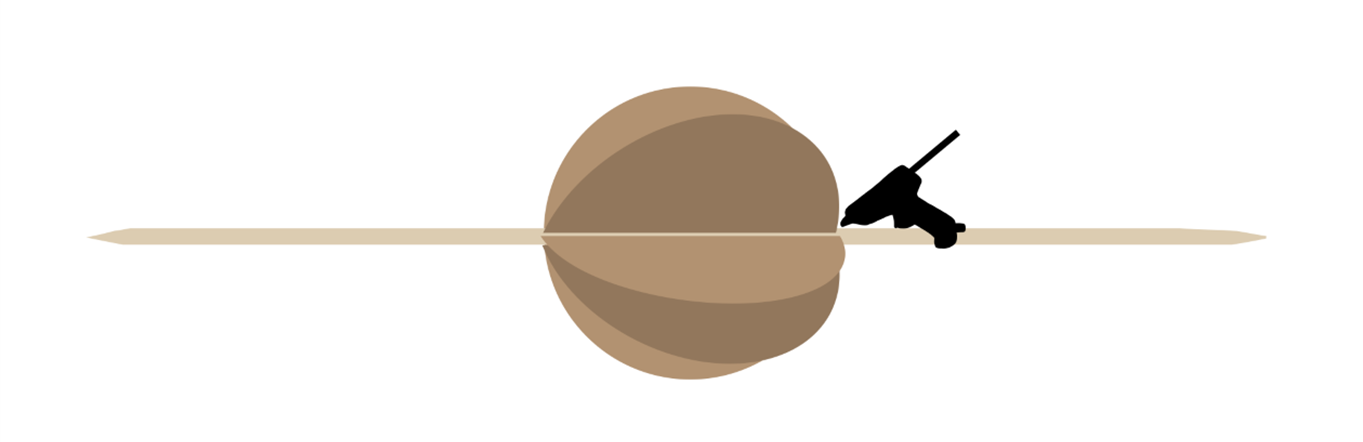
Schneide die restlichen Pappscheiben in der Mitte durch und klebe sie in gleichen Abständen an den Grillspieß. Jetzt sieht das Ganze wie ein kugelförmiges Schaufelrad aus.
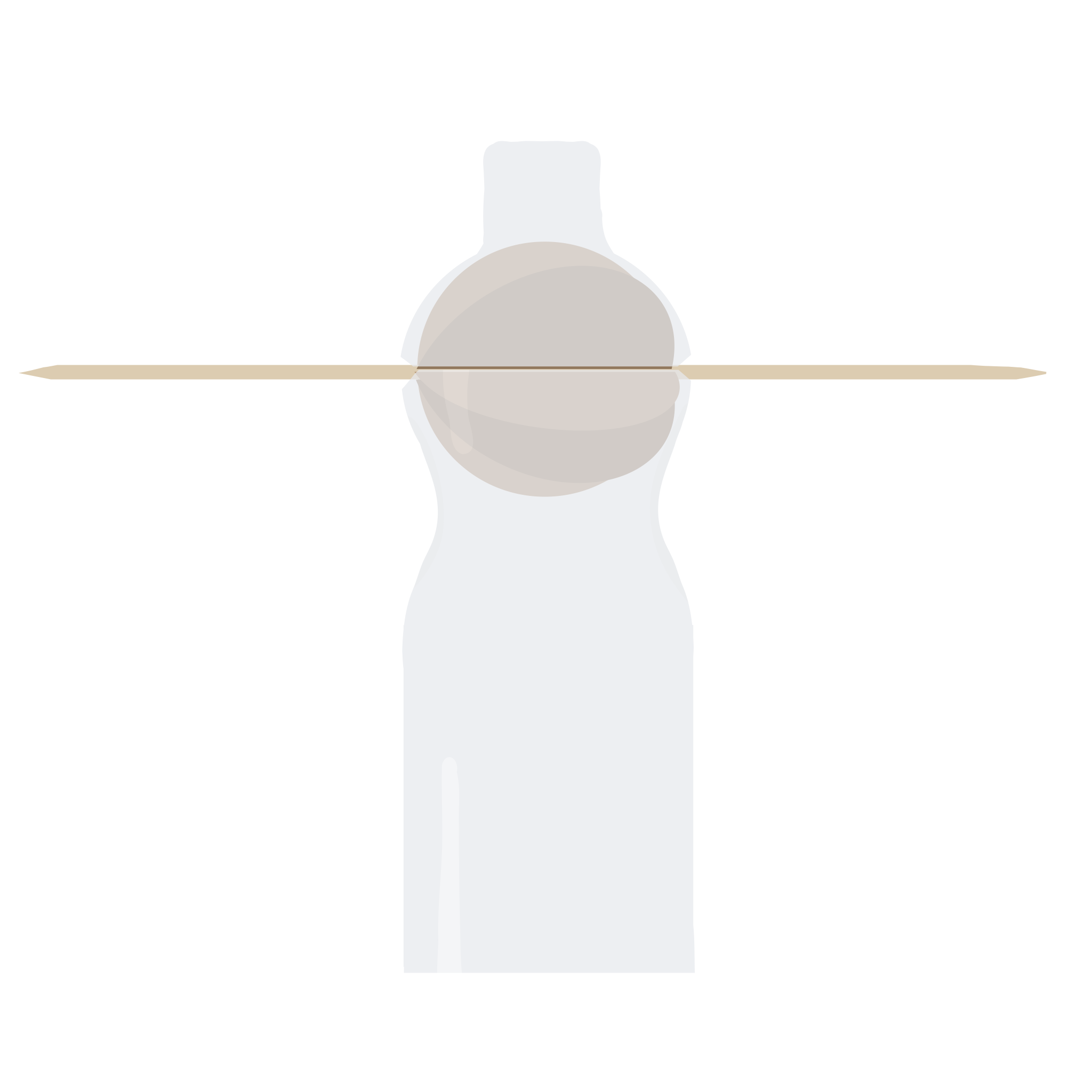
Probiere noch einmal aus, ob das Schaufelrad sich in der Flasche ungehindert drehen kann.
Jetzt klebst du den Flaschenhals mit Klebeband am Mittelstück fest.
Als Nächstes nimmst du deinen Papp- oder Schuhkarton, legst ihn auf die Seite und machst ein Loch in die Mitte der Seite, die nach oben zeigen soll. Das Loch muss so groß sein, dass die Flasche gerade so durchpasst. Die Flasche soll nämlich in diesem Loch kopfüber aufgehängt werden.
Damit die Flasche nicht hindurch fällt, kannst du einen größeren Plastikbecher nehmen, von dem du den Boden abschneidest. Stecke den Becher zuerst in das Loch. Stecke dann die Flasche von unten durch das Loch und den Becher, bis sie fest sitzt.
Jetzt verbindest du den Grillspieß auf der einen Seite mit der Drehachse des Gleichstrommotors. Du kannst dazu einen tropfen Klebstoff oder Klebeband nehmen. Der Grillspieß ist die Drehachse deines Schaufelrads und muss fest mit dem Motor verbunden sein, damit der Automat richtig funktioniert.
Jetzt befestigst du den Gleichstrommotor seitlich an deiner Pappschachtel. Falls die Achse (der Spieß) nicht lang genug ist, kannst du ein passendes Holzklötzchen zwischen die Pappwand und den Motor kleben.
Hier ist ein Bild des Futterautomaten von hinten:
Die Elektronik und Mechanik des Futterautomasten soll man von außen nicht sehen können. Drehe die Pappschachtel jetzt um, so dass du die geschlossene Rückseite siehst. (Bei einem Schuhkarton war das mal der Boden.) Schneide an der Unterkante ein Fenster aus und klappe es auf. Das ist die Standfläche für den Futternapf.
Wenn du den Futterautomaten dekorieren möchtest, kannst du ein Bild ausdrucken oder selbst etwas auf Papier zeichnen und dann aufkleben.
Ein weiteres Beispiel dafür, wie du einen Futterautomaten selbst bauen kannst, ist ein Milchkarton. Ein Milchkarton bietet sich vor allem dann an, wenn das Futter deines Haustiers so groß ist, dass es nicht durch einen Flaschenhals passt. Außerdem ist das Bauen eines Schaufelrads für den Milchkarton etwas einfacher, weil die Schaufeln dann quadratisch sind.
Abbildung
Verwenden des Futterautomaten
Nachdem du deinen Futterautomaten aufgebaut und programmiert hast, ist er einsatzbereit.
Schütte trockenes Tierfutter in den Automaten und finde einen geeigneten Platz zum Aufstellen – dort, wo es dir und deinem Haustier gut gefällt.
Aufgaben
Opgave 1
Entwirf ein Design für deinen Futterautomaten, das dir gefällt.
Entwickle einige Ideen, wie man den Futterautomaten noch verbessern kann.
Verändere dein Programm so, dass das Futter in einem anderen Zeitintervall in den Napf fällt.
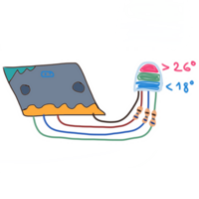
Ergänze dein Programm so, dass das Futter nur tagsüber in den Napf fällt.
Lass immer dann eine LED blinken, wenn Futter in den Napf fällt.
Verwende einen Abstandssensor, um zu erkennen, ob dein Haustier vor dem Napf steht. Das Futter soll erst dann aus dem Automaten fallen, wenn das Tier am Napf steht.