Ein
Widerstand
Widerstand (Bauelement)
Bauelement - Elektronik - Hardware
Ein Widerstand ist ein elektronisches Bauelement, das den Fluss von...
Mehr lesen
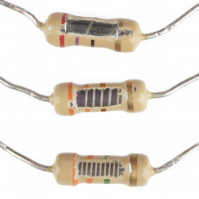
ist ein elektrisches Bauelement aus Kohlenstoff-, Metall- oder Carbonfolie. Im Innern des Widerstands ist die Folie um einen Isolator gewickelt. Je mehr Wicklungen, umso höher ist der elektrische Widerstand, weil es für die Elektronen schwieriger wird, durch das Material hindurch zu fließen.
Bei den hier abgebildeten Widerständen wurde die Außenhülle entfernt, damit man die Wicklungen im Innern sehen kann.
Der Widerstand ganz oben hat 27 Ω, der in der Mitte hat 330 Ω und der ganz unten hat 3,3 MΩ.
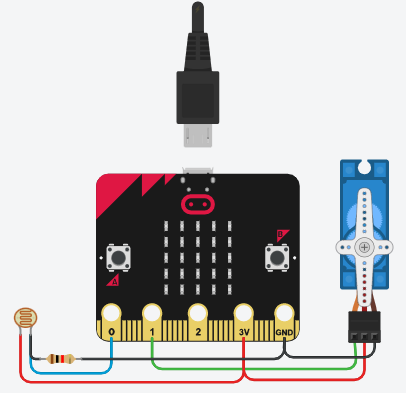
Um herauszufinden, welchen Widerstand man als Bauelement vor die LED setzen muss, berechnet man den „Vorwiderstand“.
Dazu müssen wir wissen, wie hoch die Versorgungsspannung ist. Die Versorgungsspannung, die der micro:bit liefert, beträgt 3 V. Davon ziehen wir jetzt die Spannung ab, die die Diode benötigt, um zu leuchten.
3 V minus 2 V – denn wir wissen, dass die LED mindestens 2 V als Arbeitsspannung benötigt.
Das Ergebnis ist 1 V! Nun teilen wir die berechnete Spannung durch die Stromstärke. Die Stromstärke beträgt 0,02 A.
1 V / 0,02 A = 50 Ω
Das heißt, dass wir mindestens drei Widerstände mit je 50 Ω benötigen.
Einen solchen Widerstand haben wir nicht als Bauelement. Deshalb nehmen wir den Widerstand mit dem nächsthöheren Wert. Wir verwenden also drei Widerstände mit je 56 Ω, um unseren Schaltkreis zu schützen.